L’utilisation d’un superviseur de tension permet d’accroître la fiabilité des systèmes architecturés autour d’un microcontrôleur. Il permet de surveiller les défaillances de l’alimentation et de placer le microcontrôleur en mode «?reset?» afin d’éviter les dysfonctionnements et les erreurs système. Cependant, les imperfections qui caractérisent les alimentations, qu’il s’agisse du bruit, des pointes de tension ou des transitoires, peuvent donner lieu à des réinitialisations intempestives susceptibles d’affecter le comportement du système. Cet article explique comment un superviseur de tension traite les évènements intempestifs pouvant déclencher une réinitialisation à tort dans le but d’améliorer les performances et la fiabilité du système.
Introduction
Les applications de calcul et de traitement de données qui s’appuient sur des réseaux logiques programmables (FPGA), des microprocesseurs, des processeurs de signal numériques (DSP) et des microcontrôleurs exigent un fonctionnement sûr et fiable. Ces composants requièrent certaines exigences vis-à-vis des alimentations, dans la mesure où ils ne fonctionnent que pour une certaine plage de tolérance de l’alimentation.1 Réputés pour leur contribution à la fiabilité des systèmes, les superviseurs de tension peuvent agir immédiatement dans le but de réinitialiser le système en cas de défaillance inattendue de l’alimentation pour cause de sous-tension ou de surtension. Toutefois, la surveillance des tensions des rails d’alimentation induit certains phénomènes pouvant déclencher des réinitialisations intempestives?: bruits d’alimentation, transitoires de tension et autres pointes de tension provoquées dans certains cas par l’alimentation elle-même.
Le présent article aborde les différents paramètres d’un superviseur de tension qui permettent de gérer le bruit d’alimentation, les transitoires et les pointes de tension. Nous verrons également comment ces paramètres améliorent la fiabilité des superviseurs utilisés pour surveiller les alimentations dans le but d’accroître la fiabilité du système et de l’application.
Bruit, transitoires et pointes de tension d’une alimentation dans un système
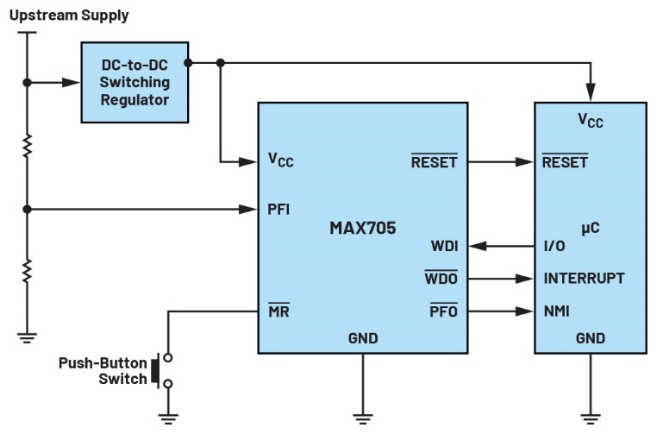
Toute alimentation présente des imperfections, à savoir des artefacts de bruit couplés au courant continu provenant de l’alimentation elle-même, des parasites générés par d’autres alimentations ou d’autres interférences créées par le système. Ces problèmes sont plus importants lorsque l’alimentation est à découpage. Ce type d’alimentation produit en effet une ondulation liée au découpage et à sa fréquence. Il produit aussi des transitoires haute fréquence dus aux phases de commutations On/Off rapides des MOSFET de puissance. La figure?1 représente un circuit où le circuit de supervision MAX705 surveille toute défaillance en sortie du régulateur à découpage qui alimente le microcontrôleur.
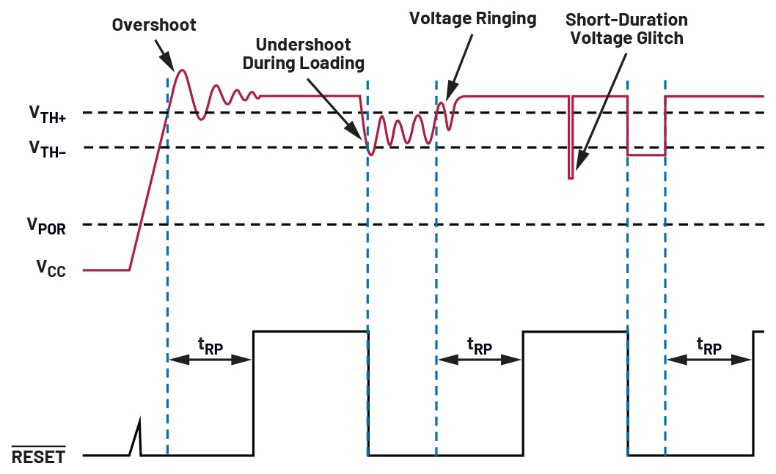
Outre les artefacts de bruit associés au fonctionnement en régime permanent, il existe certains scénarios où les transitoires de tension sont davantage prononcés. Au démarrage, on observe généralement un dépassement de la tension de sortie lié à la réponse de la boucle de régulation de l’alimentation, suivi d’une ondulation de la tension pendant un certain temps, jusqu’à sa stabilisation. Ce phénomène d’oscillation peut s’aggraver si les valeurs de compensation de la boucle ne sont pas optimisées. Surtension et sous-tension peuvent également être observés pendant les transitoires de charges. Dans les applications, il arrive que la charge exige davantage de courant pour exécuter des processus complexes, provoquant une sous-tension. À l’inverse, une réduction de charge, instantanée ou presque, entraînera une surtension. Il convient également de mentionner les pointes de tension de courte durée qui peuvent perturber l’alimentation en raison de facteurs externes. La figure?2 représente les différents transitoires et pointes de tension susceptibles de se produire sur une tension d’alimentation dans différents scénarios.
Certains transitoires peuvent survenir sans être dus à l’alimentation mais à une interface utilisateur telle qu’un interrupteur mécanique. Le basculement d’un commutateur produit des transitoires de tension et du bruit sur la broche d’entrée — généralement une broche de réinitialisation manuelle. S’ils ne sont pas pris en compte lors la conception, ces multiples facteurs — bruits d’alimentation, transitoires et pointes de tension — peuvent involontairement atteindre le seuil de sous-tension ou surtension du superviseur et déclencher une réinitialisation intempestive. Une telle situation peut se traduire par un comportement oscillatoire et une certaine instabilité, ce qui n’est évidemment pas souhaitable pour la fiabilité du système.
Comment les superviseurs de tension traitent le bruit et les transitoires pour protéger le système contre des réinitialisations intempestives?? Certains paramètres permettent de masquer les transitoires liés à l’alimentation et sa tension de sortie. Il s’agit du délai de temporisation de réinitialisation, de l’hystérésis du seuil de réinitialisation et du franchissement du seuil de réinitialisation en fonction de la durée. Par ailleurs, en ce qui concerne les transitoires liés à un contact mécanique tel qu’un bouton-poussoir sur la broche de réinitialisation manuelle, par exemple, le délai de réinitialisation manuelle et le temps de rebond masquent les transitoires. Ces paramètres contribuent à la robustesse des superviseurs en les rendant insensibles aux transitoires et aux pointes de tension, empêchant ainsi le système de réagir de manière indésirable.
Délai de temporisation de réinitialisation (tRP)
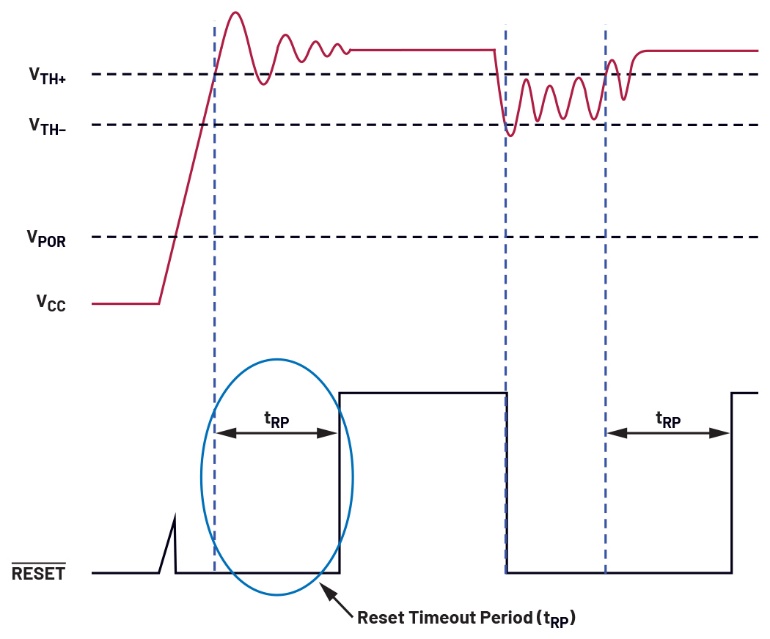
Au démarrage ou lorsque la tension d’alimentation augmente à la suite d’une sous-tension pour franchir le seuil, le signal de réinitialisation dispose d’un délai supplémentaire avant d’être désactivé?: c’est le délai de temporisation de réinitialisation (tRP — reset timeout period).2 À titre d’exemple, la figure?3 montre qu’après que la tension surveillée — qui correspond dans ce cas à la tension d’alimentation VCC — a atteint la valeur de seuil à la suite d’une sous-tension ou d’un démarrage, un délai supplémentaire est nécessaire pour que la réinitialisation soit désactivée. Grâce à ce délai, la tension surveillée peut se stabiliser, masquant ainsi le dépassement et l’oscillation avant d’activer le système ou de le sortir du mode de réinitialisation. Le délai de temporisation de réinitialisation tRP supprime les fausses réinitialisations afin d’éviter les oscillations et autres dysfonctionnements potentiels, contribuant ainsi à la fiabilité du système.
Hystérésis de seuil (VTH+)
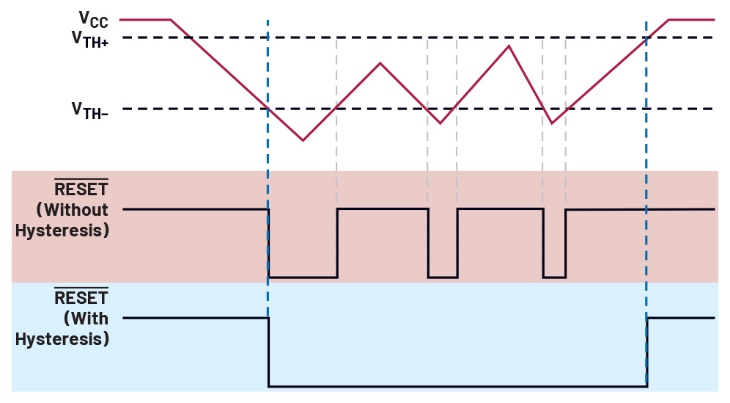
L’hystérésis de seuil (VTH+) présente deux avantages majeurs?: primo, il permet de vérifier que la tension surveillée a franchi le niveau de seuil avec une marge suffisante avant de relâcher le reset. Secundo, il laisse également l’alimentation se stabiliser avant la fin du reset. La sortie de reset a tendance à produire plusieurs transitions lors du traitement d’un signal bruité, dans la mesure où l’alimentation «?rebondit?» pour franchir à nouveau la région du seuil. Ce phénomène est illustré figure?4.3. Dans les environnements industriels, des parasites et des pointes de tension peuvent survenir à tout moment. En l’absence d’hystérésis, le relâchement du reset fera continuellement basculer ce dernier entre activation et désactivation jusqu’à ce que l’alimentation se stabilise. Ce phénomène fera également osciller le système. L’hystérésis remédie à ce problème en maintenant le reset actif afin d’empêcher tout comportement indésirable, comme le montre la zone ombrée en bleu de la figure?4. Le superviseur peut ainsi protéger le système contre les fausses réinitialisations.
Franchissement du seuil de réinitialisation en fonction de la durée
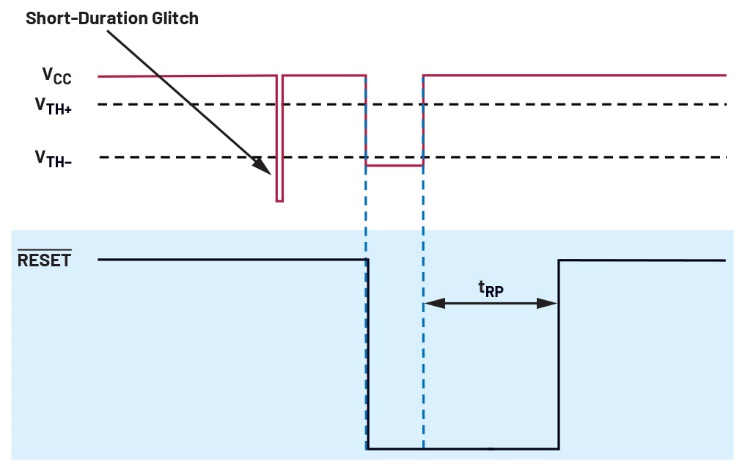
Des pointes de tension dues à des facteurs externes peuvent se produire dans n’importe quel système avec des durées plus ou moins longues. Ces pointes peuvent également correspondre à des chutes de tension d’amplitude variable. Le paramètre de franchissement du seuil de réinitialisation en fonction de la durée du transitoire est lié à l’amplitude et à la durée du glitch de tension ou du franchissement. Une variation de courte durée et de grande amplitude ne déclenchera pas l’activation du reset contrairement à un glitch de moindre amplitude et de plus longue durée (figure?5).
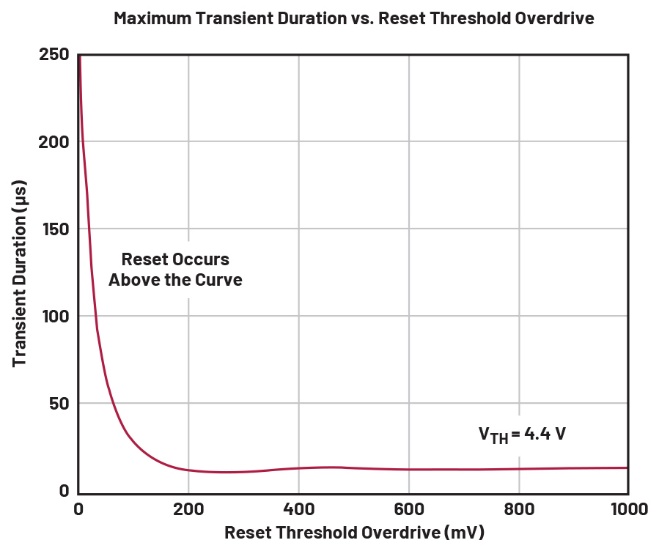
Les transitoires de tension se produisant sur l’alimentation supervisée peuvent être ignorés en fonction de leur durée. Le fait de ne pas tenir compte de ces transitoires protégera le système contre les réinitialisations intempestives potentiellement provoquées par des sous-tensions de courte durée. Celles-ci peuvent, à tort, déclencher une réinitialisation du système, entraînant un comportement indésirable. Dans les datasheets, le dépassement du seuil de réinitialisation en fonction de la durée est souvent illustré par l’une des courbes de performances typiques (figure?6). Toute valeur supérieure à la courbe déclenche une réinitialisation tandis que les valeurs situées à l’intérieur de la courbe seront ignorées afin d’éviter les réinitialisations intempestives.
Délai de réinitialisation manuelle (tMR) et temps de rebond (tDB)
Le délai de réinitialisation, le franchissement du seuil en fonction de la durée et l’hystérésis permettent de gérer les transitoires et les pointes de tension associés à la tension supervisée, laquelle correspond dans de nombreux cas à l’alimentation du microcontrôleur. En ce qui concerne les pointes de tension provoquées par des contacts mécaniques tels que des interrupteurs, le délai de réinitialisation manuelle tMR et le temps de rebond tDB minimisent l’impact potentiel des transitoires et des glitchs de tension.
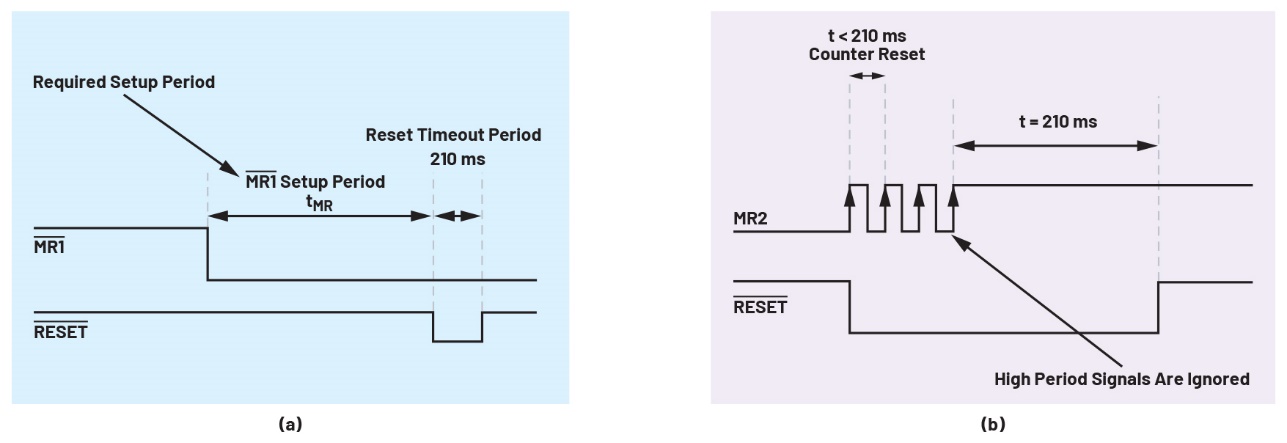
Le délai de réinitialisation manuelle tMR correspond à la durée nécessaire pendant laquelle la réinitialisation manuelle doit être maintenue afin de déclencher une réinitialisation. Certains superviseurs sont conçus avec un long délai afin de renforcer la protection du système. C’est notamment le cas des produits grand public où l’utilisateur doit appuyer sur un bouton pendant plusieurs secondes pour réinitialiser le système. Cette méthode évite les réinitialisations accidentelles et involontaires tout en renforçant la protection et la fiabilité du système. Avec le délai de réinitialisation manuelle, les glitchs et les transitoires de tension de courte durée qui se produisent lorsque l’utilisateur appuie sur le commutateur sont ignorés (figure?7a), ce qui assure l’immunité du système aux pointes de tension.
Ce concept s’applique également au temps de rebond (debounce time, tDB). À l’image du délai de réinitialisation manuelle, le temps de rebond tDB ignore les transitoires de tension périodiques de fréquences élevées lorsqu’un commutateur est manipulé. Ces transitoires haute fréquence sont considérés comme non valides et ne déclenchent pas de réinitialisation (figure?7b). Un signal qui dépasse le temps de rebond sera considéré comme un signal d’entrée valide provenant d’un interrupteur ou d’un bouton-poussoir.
Conclusion
Sans un superviseur de tension, les systèmes risquent de subir des baisses de tension et des dysfonctionnements en cas de transitoire ou de glitch de tension. Tous les paramètres examinés ci-dessus (délai de temporisation de réinitialisation, hystérésis de seuil, franchissement de seuil, délai de réinitialisation manuelle et temps de rebond) améliorent la fiabilité des superviseurs de tension utilisés pour surveiller les tensions d’alimentation en les rendant insensibles aux transitoires et aux glitchs, avec à la clé une augmentation de la stabilité, de la fiabilité et des performances globales du système.
Auteur : Noel Tenorio, Ingénieur Applications Produits, Analog Devices
Noel Tenorio est ingénieur d’application spécialisé dans les produits de supervision haute performance chez Analog Devices Philippines. Avant de rejoindre Analog Devices en août 2016, Noel a occupé pendant six ans le poste d’ingénieur-concepteur dans une société de R&D spécialisée dans les alimentations à découpage. Il est titulaire d’une licence en ingénierie électronique et communications de l’Université d’État de Batangas (Philippines), d’un diplôme d’études supérieures en génie électrique avec spécialisation en électronique de puissance, et d’une maîtrise en ingénierie électronique de l’Université de Mapua (Philippines).
Source : com-trail.fr