Die Konstruktion eines mobilen Roboters mit vier Rädern, bei dem die Richtungsänderung durch das Variieren der Geschwindigkeit eines der beiden vorderen Räder erfolgt, stellt eine spannende Herausforderung in der Robotik dar. Diese Technik wird oft in einfachen mobilen Robotern verwendet, da sie kostengünstig und relativ einfach zu implementieren ist. Durch das Verändern der Drehgeschwindigkeit eines vorderen Rades kann der Roboter präzise gesteuert werden, was ihn besonders für Anwendungen in begrenzten Umgebungen geeignet macht. Roboter wie der Parallax Boe-Bot oder das LEGO Mindstorms EV3 Kit nutzen diese Technologie und können Geschwindigkeiten von etwa 0,5 m/s erreichen, was für viele Bildungs- und Forschungszwecke ausreichend ist. Allerdings müssen Ingenieure auch die Herausforderungen dieser Technik berücksichtigen: Die Stabilität des Roboters kann bei höheren Geschwindigkeiten und schnellen Richtungswechseln beeinträchtigt werden, was zu einem Risiko des Kippens führt. Zudem kann der ungleiche Verschleiß der Räder bei längerem Einsatz zu höheren Wartungskosten führen. Insgesamt bietet die Technik eine gute Lösung für Roboter mit niedriger bis mittlerer Geschwindigkeit (bis etwa 1 m/s), während sie bei Robotern, die mehr Präzision und Stabilität benötigen, an ihre Grenzen stößt.
1. Einführung: Was ist ein 4-Rad-Roboter mit geschwindigkeitsteuerung?
Ein 4-Rad-Roboter, der mit der Technik der Richtungssteuerung durch unterschiedliche Radgeschwindigkeiten arbeitet, verwendet zwei vordere Räder, deren Drehgeschwindigkeit variiert, um die Richtung des Roboters zu ändern. Dieser Mechanismus funktioniert ähnlich wie bei einem Differentialantrieb, bei dem das Fahrzeug durch unterschiedliche Drehgeschwindigkeiten der Räder nach links oder rechts gelenkt wird. Diese Methode ist besonders für kleinere und mittelgroße mobile Roboter geeignet, die sich in einem begrenzten Raum bewegen müssen.
2. Vorteile der technik
2.1 Einfache steuerung und implementierung
Ein bedeutender Vorteil der Verwendung eines 4-Rad-Roboters mit Geschwindigkeitsteuerung liegt in der Einfachheit der Steuerung. Mit nur zwei Motoren (einer für jedes vordere Rad) ist die Steuerung vergleichsweise unkompliziert. Ein einfaches Steuerungssystem, das die Geschwindigkeit der Räder variiert, ermöglicht es dem Roboter, präzise und mit geringer Rechenleistung zu manövrieren. Dies ist besonders vorteilhaft in Anwendungen, bei denen eine schnelle Reaktionszeit erforderlich ist.
2.2 Geringer platzbedarf und kompakte bauweise
Ein 4-Rad-Roboter, der mit dieser Technik betrieben wird, benötigt keine komplizierte Mechanik für die Lenkung. Es sind keine zusätzlichen Lenkachsen oder Servomotoren erforderlich, was zu einer geringeren Komplexität im Design führt. Dies ermöglicht einen kompakteren Roboter, der in engen oder schwer zugänglichen Räumen eingesetzt werden kann.
2.3 Hohe wendigkeit und flexibilität
Durch die Verwendung der vorderen Räder zur Richtungssteuerung erhält der Roboter eine hohe Wendigkeit. Die Geschwindigkeit des Roboters kann variabel angepasst werden, um enge Kurven zu fahren oder schnelle Richtungsänderungen vorzunehmen. Dies ist besonders nützlich für Roboter, die in dynamischen Umgebungen agieren müssen.
3. Nachteile der technik
3.1 Eingeschränkte stabilität bei hohen geschwindigkeiten
Ein häufiger Nachteil dieser Technik ist die reduzierte Stabilität bei hohen Geschwindigkeiten. Da die Drehgeschwindigkeit eines der vorderen Räder die gesamte Richtung des Roboters beeinflusst, kann es bei schnellen Bewegungen zu instabilen Bewegungen kommen. Dies macht den Roboter weniger stabil und erhöht das Risiko von Kippvorgängen, insbesondere wenn der Roboter eine hohe Geschwindigkeit erreicht.
3.2 Ungleichmäßiger reifenverschleiß
Da das Ändern der Richtung durch eine unterschiedliche Geschwindigkeit der vorderen Räder erfolgt, wird das äußere Rad stärker beansprucht als das innere. Dies kann zu einem ungleichmäßigen Verschleiß der Räder führen, was die Wartungskosten erhöht und die Lebensdauer des Roboters verringert.
3.3 Begrenzte tragfähigkeit und lasten
Ein weiterer Nachteil ist, dass solche Roboter aufgrund ihrer einfachen Konstruktion und der fehlenden Lenkachse eine begrenzte Tragfähigkeit haben. Sie sind nicht in der Lage, große Lasten zu transportieren oder komplexe Aufgaben zu übernehmen, die mehr Kraft und Präzision erfordern.
4. Vergleich mit anderen antriebssystemen
5. Beispiele für roboter mit dieser technik
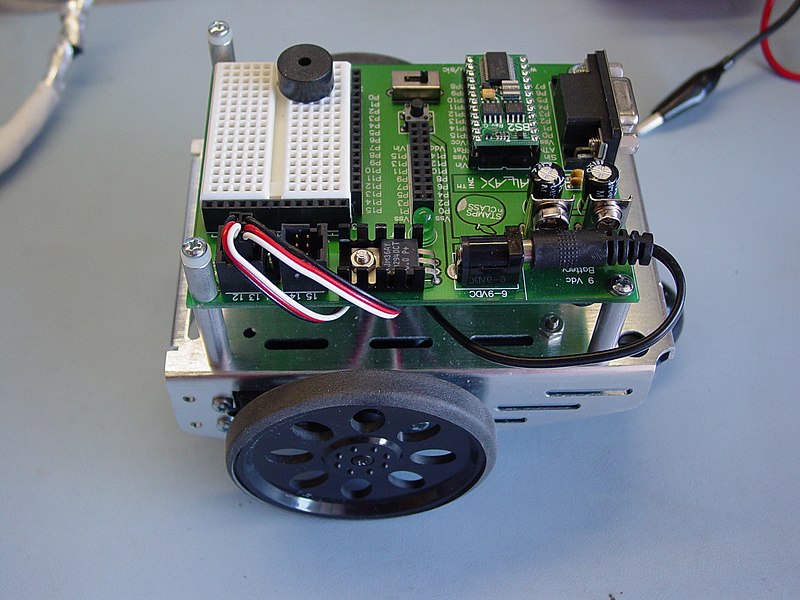
5.1 Parallax Boe-Bot
Der Parallax Boe-Bot ist ein einfach zu programmierender, mobiler Roboter, der auf dieser Technik basiert. Er verwendet zwei vordere Räder mit variabler Geschwindigkeit, um die Richtung zu ändern. Der Boe-Bot ist aufgrund seiner niedrigen Kosten und einfachen Konstruktion bei Roboter-Hobbyisten und Bildungszwecken sehr beliebt.
5.2 Lego Mindstorms EV3
Das Lego Mindstorms EV3 Kit kann ebenfalls einen 4-Rad-Roboter mit Geschwindigkeitsteuerung aufgebaut werden. Es nutzt zwei vordere Motoren, um die Richtungssteuerung zu ermöglichen. Der EV3 bietet eine flexible Plattform für Lernende und Profis, die sich mit Robotik beschäftigen, und bietet eine Reihe von Möglichkeiten für Anpassungen und Erweiterungen.
5.3 TurtleBot
TurtleBot ist eine Plattform, die häufig in der Forschung und Lehre verwendet wird. Sie verwendet einen Differentialantrieb, der auf der Technologie der Geschwindigkeitsteuerung basiert. TurtleBot ist besonders bekannt für seine Verwendung in der Open-Source-Roboter-Community und bietet eine ausgezeichnete Grundlage für die Entwicklung von mobilen Robotern.
6. Fazit
Der 4-Rad-Roboter mit Geschwindigkeitsteuerung durch die vorderen Räder bietet viele Vorteile in Bezug auf Einfachheit, Wendigkeit und Kompaktheit. Allerdings bringt die Technik auch Herausforderungen mit sich, insbesondere in Bezug auf Stabilität und Wartung. Für kleinere, weniger komplexe Anwendungen ist dieser Ansatz eine hervorragende Wahl, während größere oder schnellere Roboter möglicherweise von anderen Lenkmechanismen profitieren könnten.
Es bleibt abzuwarten, wie sich diese Technologie mit der Weiterentwicklung von Motoren, Sensoren und Rechenleistung weiter verbessern wird.